随着智能家用与商用机器人快速发展,扫地机器人的性能测评成为研究热点。其中,“清扫覆盖率”实验要求对机器人在模拟环境中的运动轨迹进行高精度、实时追踪。传统视觉识别、信号发射及激光定位方法存在设备昂贵、精度不足、无法实时预览等问题,严重制约实验效率与准确性。
苏州大学相城机器人与智能装备研究院在进行“基于扫地机器人的Pose Tracking System”研究时,迫切需要一种高精度、低成本、可定制的动捕系统替代传统方案。
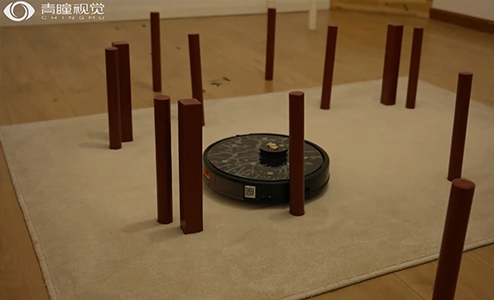
该团队通过CHINGMU(青瞳视觉)MC系列光学动捕系统采用定制化贴片式Marker点设计,在不影响机器人运动的前提下,通过红外光学相机实现亚毫米级三维定位,有效替代传统视觉识别方式。
目前,该团队已于2020年成功发布IEC/ASTM 62885 7:2020国际标准,2021年依据国际标准相关的一些性能要求,用CHINGMU(青瞳视觉)动捕相机做机器人的性能检测,已为国内外近十多家的机器人企业和第三方检测机构提供全流程服务工作。
CHINGMU(青瞳视觉)动捕系统替代传统方案:
同时,系统支持对机器人位置、方向、速度等多参数实时追踪与可视化展示,大幅提升实验观察与数据采集效率。区别于国外闭源系统,CHINGMU(青瞳视觉)自主研发的动捕软件支持开放接口与二次开发,可按需定制数据结构与分析逻辑,完美适配实验室测量指标与算法流程。
成果亮点:
客户评价:“在传统动捕方式难以满足高精度与实时预览需求的背景下,青瞳视觉的系统为我们PTS实验提供了最佳解决方案,实现了在成本、效率和精度上的三重突破。”—— 苏州大学相城机器人与智能装备研究院 负责人